V-Dolphin AVS
Software Family for Amethyst AUV Platform
working with Raspberry Pi and Arduinos
NOW IN WILD ALFA VERSION
(Contact me if you want help with testing)
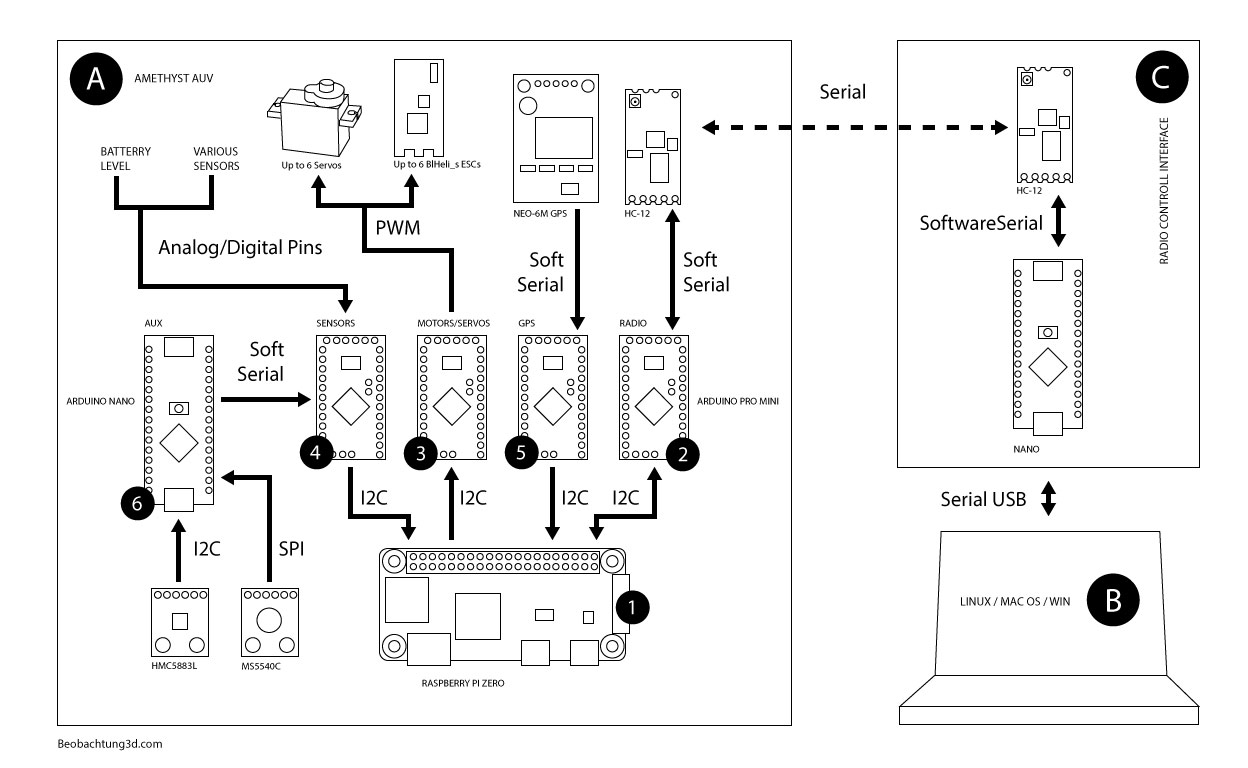
Vector Dolphin is modular software family for almost any autonomous vehicle or station. Is primary developed for Amethyst AUV Platform, but can be easily adapted for any other robotic craft. V-Dolphin using power of Linux/Python based microcomputer like Raspberry Pi ZERO and reliability of Arduino/Wiring microcontrollers. Those two worlds in combination creates almost endless possibilities for connecting of motors, servos, antennas, sensors of various kinds, modifications, brands or communication protocols.